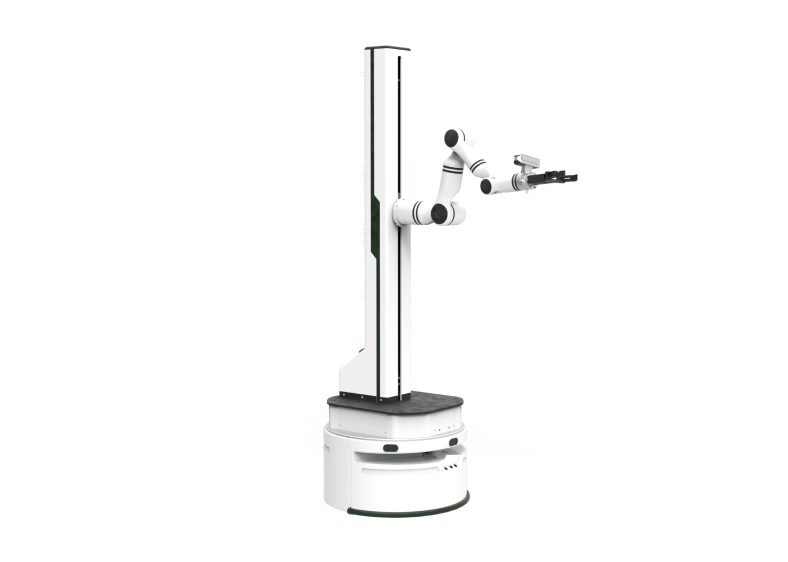
设计一款复合机器人,它集成了两条超轻量仿人机械臂,能够自主导航,识别各种家居物品,可用于家庭环境的清洁与整理。
自动导航系统:装备有先进的视觉传感器和激光雷达,能够在多种家庭环境中精准定位和导航。
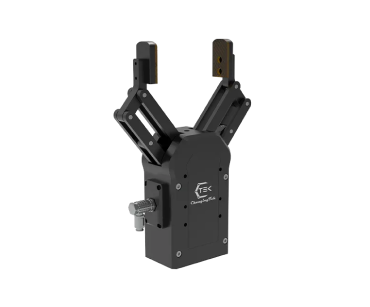
物体识别与分类:集成深度学习算法,使复合机器人能识别不同的家居物品,如酒瓶、杯子、书籍等,并进行合理分类。
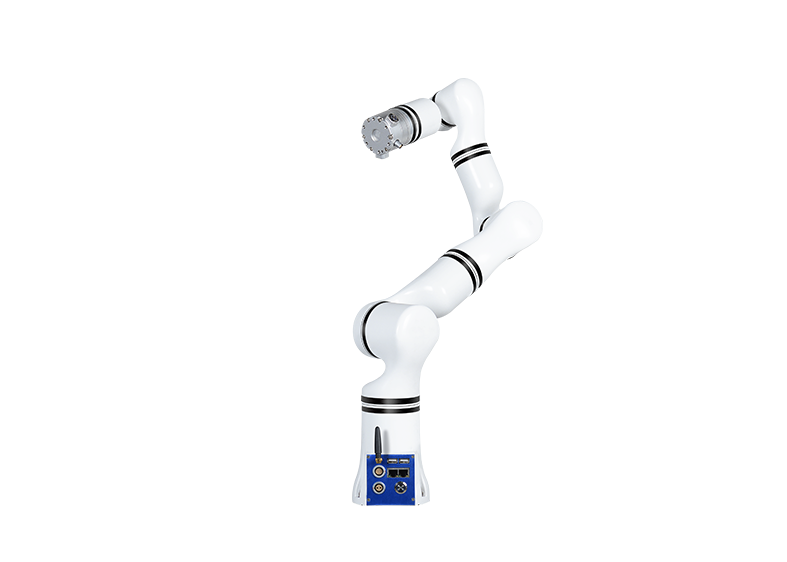
超轻量仿人机械臂:具备高灵敏度和精确控制能力,模仿人类手臂的运动,能够细致地进行拾取、摆放等操作。
智能规划清洁路径:根据家庭布局和清洁需求,自动规划高效的清洁路径,避免重复清扫或遗漏区域。
静音设计:所有运动部件均设计为低噪音,确保在不干扰家庭成员休息和活动的情况下进行清洁工作。
自动充电:当电量不足时,复合机器人能自动返回充电站充电,并继续未完成的任务。
多场景适用性:除了清洁和收拾屋子,也能适应其他场景,如办公室、餐厅等。
安全性:设计应确保机械臂在操作过程中不会对家具或家庭成员造成伤害。
维护性:机器人的设计需便于日常保养和故障维修。
用户交互:界面友好,确保所有年龄段的用户都能轻松操作。

微信公众号

抖音号

视频号
©2021 睿尔曼智能科技(北京)有限公司 版权所有 | 技术支持:外贸网站建设


































 上一个
上一个

