

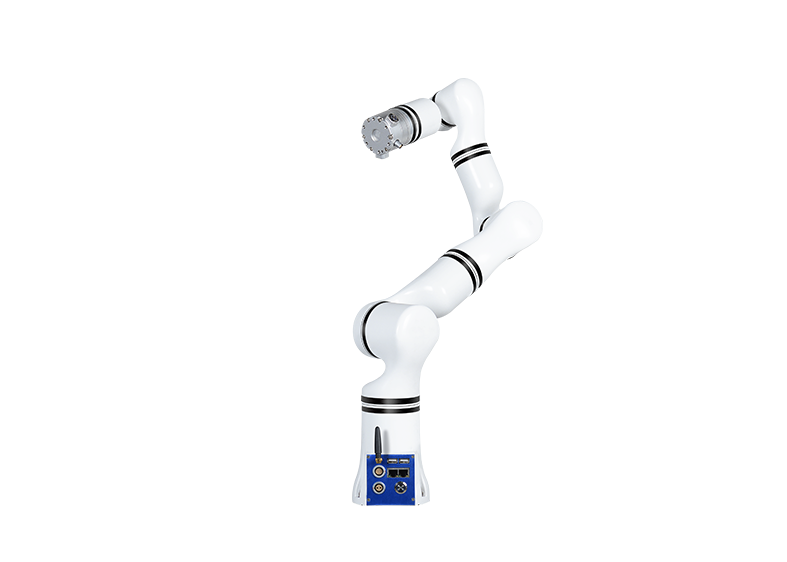







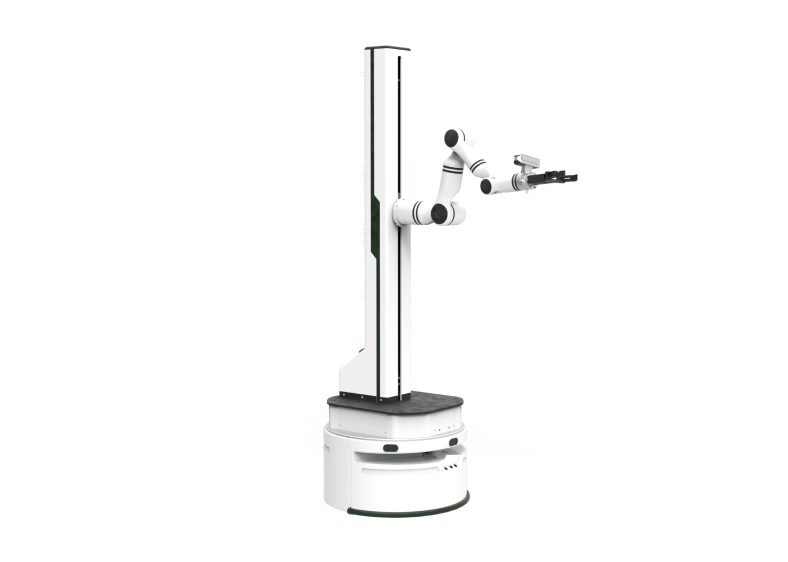



















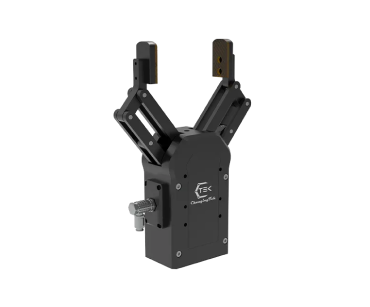







与传统的复合机器人相比,增加了升降系统,进一步扩展了机器人的工作空间。同时在机械臂末端配备了执行工具和一款开源的3D视觉传感器,使其有更高的任务准确性和灵活性。
优势特点

集成度高
将移动底盘、竖直导轨、机械臂、视觉传感器、末端工具通过主控模块集成于一体,方便维护,节省空间。
交互性好
设计方便易懂的人机交互界面,便于学习者能够更快的了解系统。

开放性强
提供多种二次开发形式,支持用户针对使用场景进行应用开发。
功能丰富
传感器类型多样,各单元可进行单独控制也可以进行协同控制。





产品参数
| 复合升降机器人 | |||
|---|---|---|---|
| 型号 | RMC-LA | RML-125-1800 | |
| 平台尺寸 | 总高1630mm | 总高2430mm | |
| 重量 | 约76kg | 约88kg | |
| 充电电源 | 单相三线~220V±10% 50Hz | ||
| 工作电压 | DC24V | ||
| 安全保护 | 具有激光扫描避障、视觉避障、力传感器、紧急停止等功能 | ||
| 对外接口 | 网口、USB口、HDMI | ||
| 工作环境 | 温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m | ||
| 语音模块 | — | ||
| 有效升降距离 | — | 1.8m | |
| 升降速度 | 150mm/s | ||
| 主控模块 | GPU | 384-core NVIDIA Volta™ GPU with 48 Tensor Cores | |
| CPU | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6MB L2 + 4MB L3 | ||
| 内存 | 8 GB 128-bit LPDDR4x 59.7GB/s | ||
| 操作系统 | Ubuntu18.04 | ||
| 网口数量 | 1 | ||
| USB3.0接口数量 | 4 | ||
| USB2.0接口数量 | 1 | ||
| 其他接口 | GPIOs, I2C, I2S, SPI, UART | ||
| 尺寸 | 90mm×103mm×35mm | ||
相关下载
产品手册
睿尔曼产品宣传册V3.2_CN(客户版)
pdf|30.6M
关节资料
关节产品资料
pdf|M





