12小时内快速解决问题

7x24小时一对一微信服务群时时响应
pdf|30.6M
pdf|M
pdf|M
pdf|M
pdf|M
pdf|M
pdf|M
pdf|M
碰撞等级可通过机械臂教学挂件设置,分为0 ~ 8个等级。通电后,机械臂默认不启用碰撞检测。碰撞级别越高,检测越灵敏,越容易阻止意外碰撞。用户可以配置它来满足他们的特定需求。
ZF和6F版本的机械臂具有内力控制算法模块,可直接配置并用于教学挂件。同时,用户可以直接读取传感器数据,并在上位机上开发自己的算法。
拖拽教学后的轨迹可以通过教学挂件和函数接口进行保存和调用。
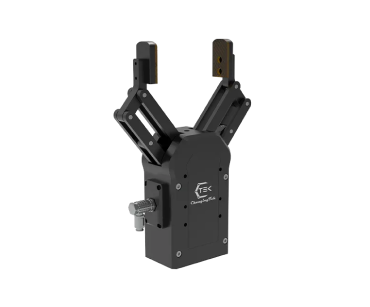
夹持器可以在拖动和复制时操作。此功能目前仅适用于双指握持器,未来支持范围将进一步扩大。
机械臂末端可输出5V/12V/24V,最大输出电流1.5 a。它可以是具有RS485通信接口的设备,支持标准Modbus RTU协议。同时,我们在末端控制板上编写了两指夹持器和五指灵巧手的驱动程序,可以直接使用。
是的。机械臂的RS485接口可用于控制基于Modbus协议的外围设备,如传感器或夹持器。RS485接口也可以用来控制机械臂。需要通过命令切换模式,但不能同时使用两种模式。
如果用户直接使用我们打包的API,则只能在Linux/Windows中使用C/ c++ / c# /Python项目或使用ROS操作系统调用它。如果用户使用JSON协议,灵活性将会高得多。只要可以按照协议交付固定字符串,不受用户操作系统和编程语言的限制。
透明传输是指用户使用上位机规划轨迹,然后将每个关节的角度直接发送给控制器。每个关节直接操作,不需要控制器处理。机械臂操作的有效性直接取决于用户轨迹规划的水平。最大传输周期WIFI为20ms,普通网口为20ms(右),USB、485、高速网口为10ms(左)。主要用于验证用户算法或结合视觉进行非结构化环境下的动态轨迹规划,以实现抓取或避障。
机械臂关节内没有扭矩传感器。超轻量的类人机械臂通过电流回路控制关节力,相当于我们的机械臂的力控制。有开发能力的用户可考虑选择性开放,但需提前签订相关协议。用户可以使用力传感器数据接口创建力控制,而无需开发单独的接口。
机器人手臂控制器内部的程序是该公司的核心,目前尚未向公众开放。
机械臂在额定负载下的连续使用寿命为30000小时。目前已获得上海国家机器人检测中心MTBF检测认证。
机械臂的供电电压范围为20v ~ 27v DC,功率为200w。但是,为了使机械臂在通电后进行初始化和自调谐,供电设备提供的最大瞬时电流最好在20a以上。
该软件是终身授权的,软件升级目前是免费的。
目前支持三种形式的二次开发,一种是通过API,目前支持四种开发环境:C\ c++ \ c# \Python。二是通过JSON协议进行控制,该协议对于开发语言和系统是不受限制的。第三种是通过ROS进行控制,目前支持四个版本:Melodic Morenia、Noetic Ninjemys、Foxy Fitzroy、Humble Hawksbill。
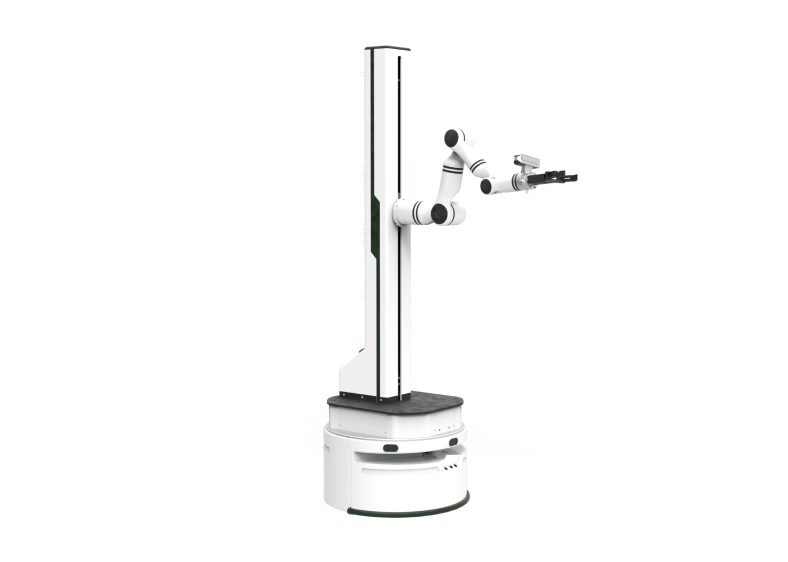
睿尔曼机械臂现已广泛应用于医疗健康、医疗保健、智能检测、自动化实验室、科研教育、新餐饮、新零售、家居服务、3C中转、物流仓储、工业生产、农业收获等各个行业,并有相应的成功案例。
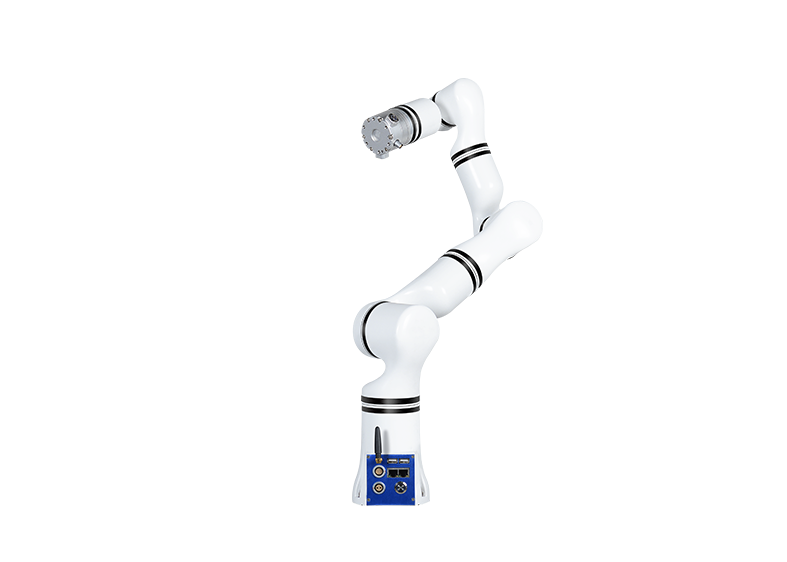
超轻量人形机械臂主要有三个产品系列:RM65、RM75和RML63。RM代表RealMan, L代表长臂跨距,第一个数字代表轴数,即6轴或7轴机械臂,第二个数字代表重量,单位是公斤。每个系列又分为二个型号:-B为基础型,-6F为六轴力型。
机械臂和控制器集成,无需传统的控制柜。基础版机械臂体(带控制器)的重量仅为7.2 KG,不带控制器的重量仅为6kg。同时载重量可达5kg,载重自重比为1:1.2。超低功耗,直流24V供电,适用于移动电源。满负荷情况下,最大功耗≤200w,综合功耗≤100w。
睿尔曼是超轻量仿人机械臂的定义者,超轻量代表RM系列机械臂只有普通协作臂重量的1/4,负载可达5Kg,并完全仿照人手臂的实际尺寸和重量1:1打造,各关节也和人手臂相似,可以不对原有环境进行二次改造,真正实现机械臂与人与环境的友好共融。
睿尔曼是一家专注于超轻量仿人机械臂研发,生产,销售于一体的国家级高新技术企业,可以提供超轻量仿人机械臂以及相关场景应用需求的集成设备。

微信公众号

抖音号

视频号
©2021 睿尔曼智能科技(北京)有限公司 版权所有 | 技术支持:外贸网站建设