

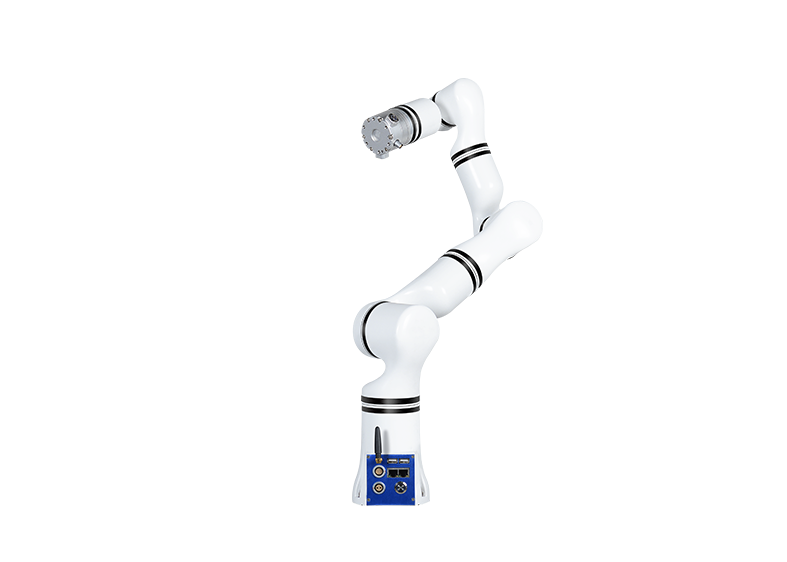

































ECO62型机械臂外形小巧,负载大,兼具优异的工业性能,满足在狭小空间的与人协作、快速作业需求;轻量圆滑外观带来本质安全;动作柔顺带来交互安全;支持工业、医疗、商服、教育等行业场景应用及定制化。
-
3.3kg
机械臂(含控制器)重量
-
2kg
额定负载
-
355mm
工作半径
-
±0.05mm
重复定位精度
优势特点
一体化模块化
一体化、模块化设计,拆装更便捷,维护成本低 ,效率更高。
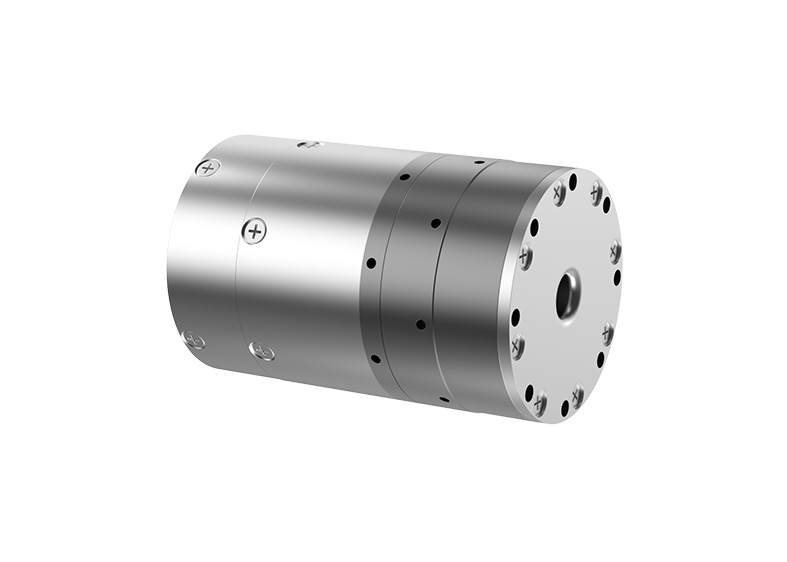
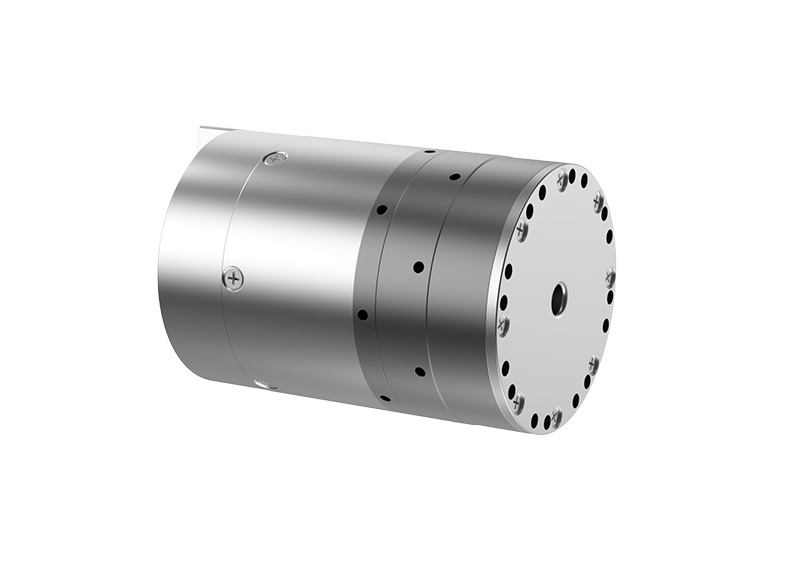
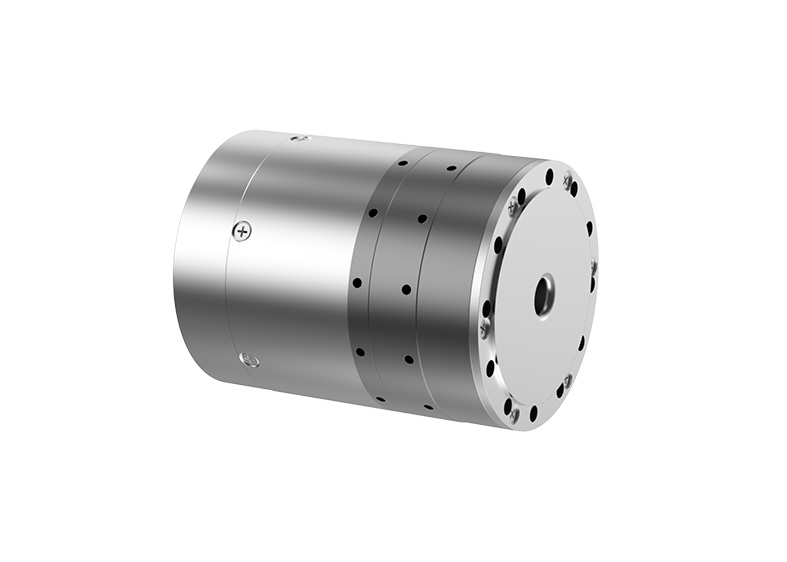
一体化关节设计
高能量密度比的一体化关节是整条机械臂的核心。经过测试,稳定性、可靠性出众,达到国内领先水平。
一体化微型控制器
控制器作为机械臂的大脑,负责收集信息和传达指令;睿尔曼打破尺寸极限,将控制器进一步小型化,集成到机械臂内部,为客户带来便利。

系统开放
开放的API函数库,支持C/C++/C#/Python编程语言,支持Windows/Linux/ROS机器人操作系统及多种通讯协议。

超低功率
直流24V供电,可适用于移动电源,在满负载情况下最大功耗≤200W,综合功耗≤100W,可应用于多种场景。
无线便捷互联
智能终端可通过有线和无线连接控制机械臂,任意切换,方便快捷,摆脱控制线缆束缚。
超高兼容性
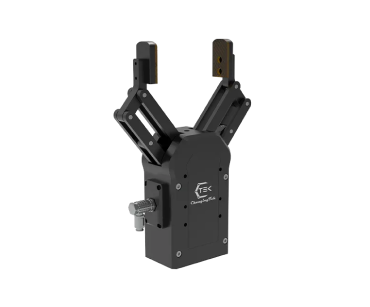
末端具备通用接口,灵活扩展,即插即用,一体化机械臂仍自带丰富接口,满足多行业应用需求扩展。

安全功能设计
在保证机械臂体积小巧精致的基础上添加关节抱闸功能,满足工业场景使用需求,确保工作安全和交互安全。






产品参数
ECO62-B | |
|---|---|
| 自由度 | 6 |
| 最大负载 | 2kg |
| 本体重量 | 3.3kg |
| 重复定位精度 | ±0.05mm |
| 工作半径 | 355mm |
总体高度 | 505mm |
| 供电电压 | DC20-30V 额定DC24V |
| 功耗 | 最大功耗200W 综合功耗100W |
| 防护等级 | IP54(机械臂本体) |
| 材质 | 铝合金,ABS |
| 控制器 | 集成 |
| 通讯方式 | WIFI/网口/蓝牙/USB串口/RS485 |
| 控制方式 | 拖拽示教/示教器/API/JSON |
| 关节运动范围 | J1 ±178°、J2 +62°~-178°、J3 +126°~-150°、J4 ±150° |
关节抱闸
| 关节J1-J3具备硬抱闸功能 |
关节J4-J6 具备软抱闸功能 | |
相关下载
产品手册
睿尔曼产品宣传册V3.2_CN(客户版)
pdf|30.6M
关节资料
关节产品资料
pdf|M





