








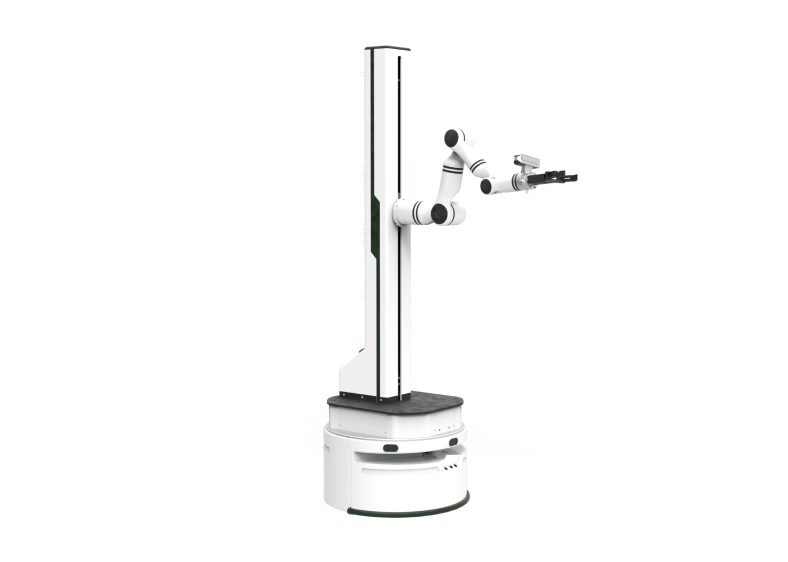
























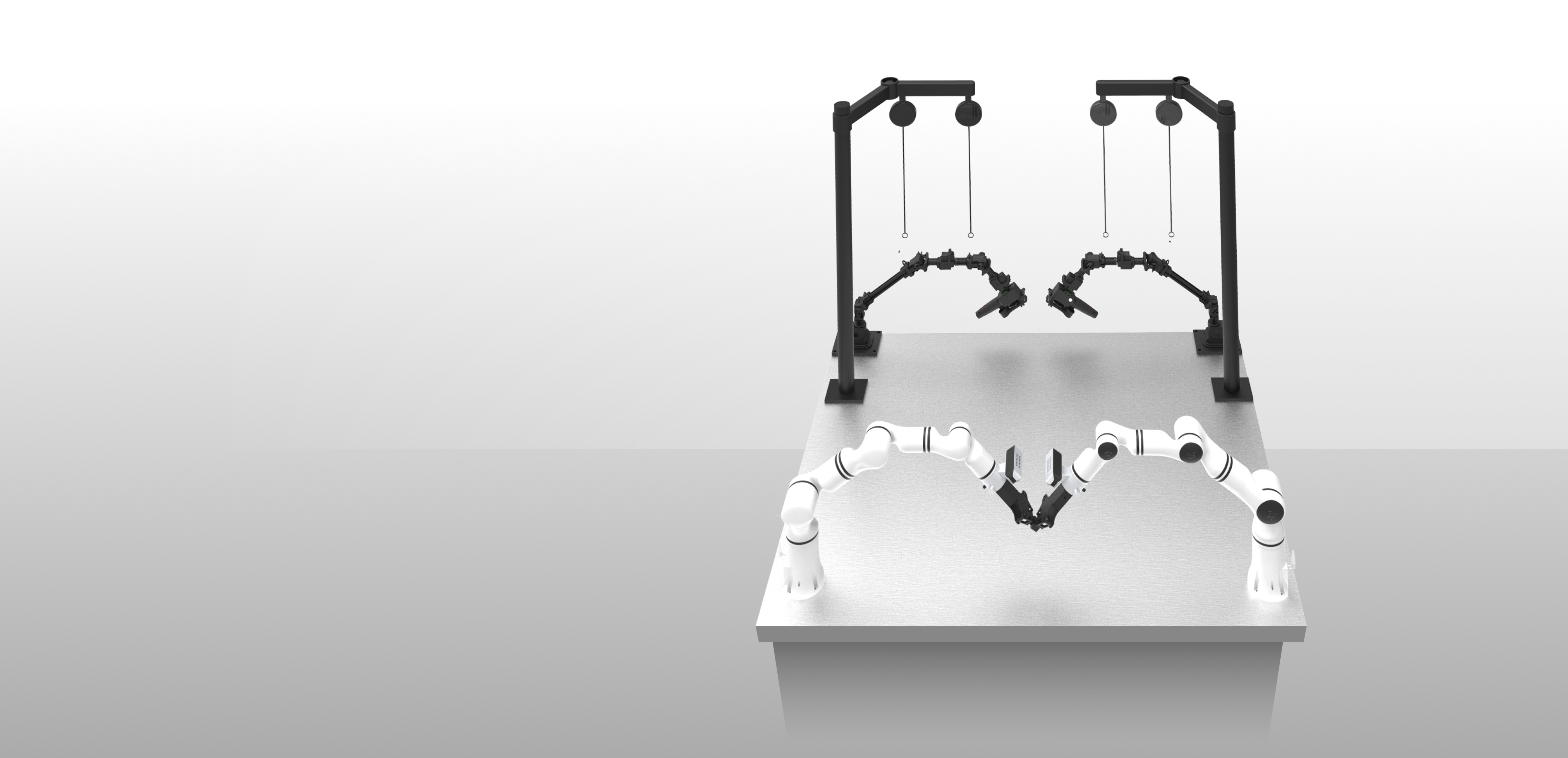

用于具身大模型的数据采集装置,基于模仿学习的算法通过 50 次任务演示加静态数据训练,可以将任务的执行成功率提高到90%,准配置包括双臂操作主臂、被动运动从臂、识别物体的全局摄像头和安装于从臂上的局部摄像头。
优势特点
算法功能及应用
大模型应用运动学、动力学轨迹规划、视觉识别
功能丰富
传感器类型多样,各单元可进行单独控制也可以进行协同控制。

开放性强
提供多种二次开发形式,支持用户针对使用场景进行应用开发。
交互性好
设计方便易懂的人机交互界面,便于学习者能够更快的了解系统。

集成度高
将移动底盘、竖直导轨、机械臂、视觉传感器、末端工具通过主控模块集成于一体,方便维护,节省空间。






产品参数
具身智能双臂开发平台 标准配置:舵机主臂×2、RM65-B-V×2、D435摄像头×3、夹爪×2、固定支架×1 | ||
|---|---|---|
| 主臂参数 | 运用半径 | 599mm |
| 角度分辨率 | 0.088° | |
| 自由度 | 6(双臂12自由度) | |
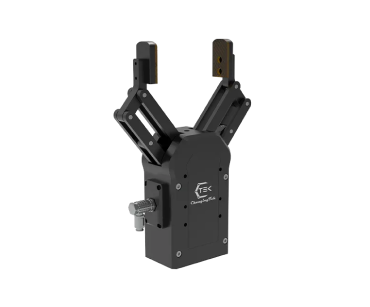
| 指环夹具 | 导轨式 | |
| 自重 | 1.5kg左右(含夹具) | |
| 拖动力 | 零力拖动 | |
| 最大操作速度 | 110RPM | |
| 重力补偿系统 | 可调节的悬挂伸缩器 | |
| 交互 | 光电自动感应手持启动或关闭 | |
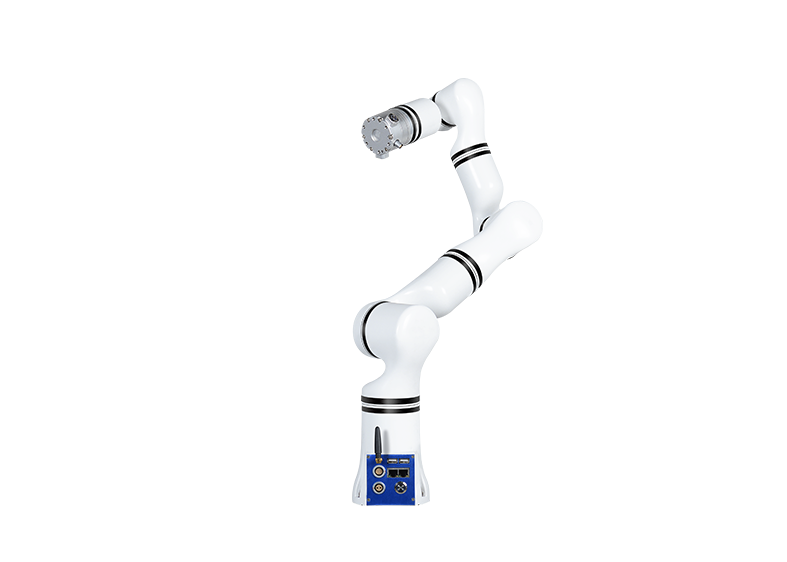
| 从臂参数 | 运用半径 | 626mm |
| 额定负载 | 5kg | |
| 机械臂净重 | 7.2kg | |
| 控制器 | 与机械臂一体化 | |
| 重复定位精度 | ±0.05mm | |
| 供电电压 | DC24V | |
| 工作温度 | 0℃~45℃ | |
| 通信接口 | 网口/WIFI/RS485 | |
| I/O接口 | 4路客服用数字IO |
相关下载
产品手册
具身智能双臂开发平台 产品单页
pdf|M
关节资料
关节产品资料
pdf|M





