 2025-02-13
2025-02-133D具身智能数据集在赋能具身智能领域方面具有不可估量的潜力。作为具身机器人的“智慧核心”,高质量的具身大数据是提升具身大模型性能的关键所在。与依赖文本和图像数据的大语言模型或视觉大模型不同,具身数据必须通过真实的机器人操作或高级仿真平台来生成,因此其稀缺性与重要性不言而喻。
近日,睿尔曼公司与智境云创携手达成战略合作协议。双方将充分发挥在遥操数据采集与具身智能的互补优势,共同探索3D具身数据集、大模型在具身机器人领域的深度交互应用与发展路径。
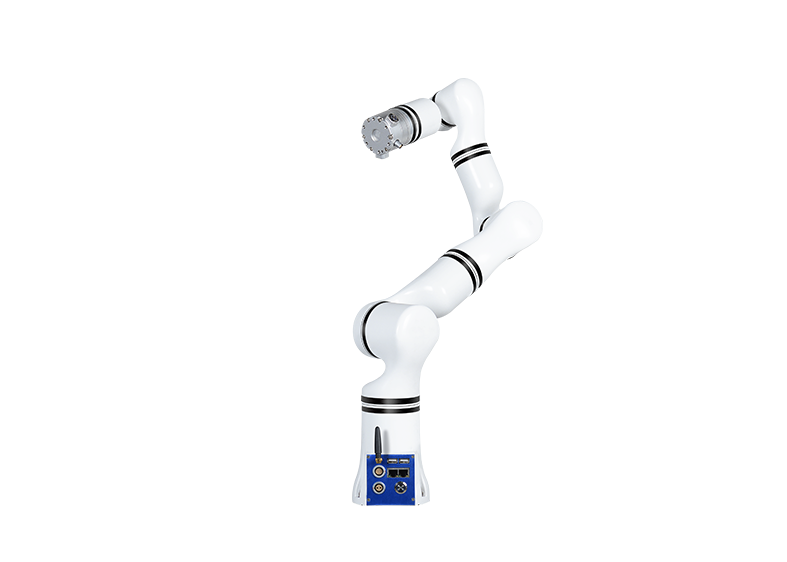
睿尔曼的目标是要做好具身智能机器人的坚实“基座”,其中,睿尔曼超轻量仿人机械臂在设计上参照了人体胳膊的长短、粗细、灵活度及负载能力,从外观到性能实现与人、与工作、与生活环境的友好共融,力求 “人能干,它能干”,“超轻量仿人” 优势尽显。
在保证“灵活、轻便、安全”的同时,睿尔曼更注重整体性能的协同,机械臂从核心零部件如控制器、驱动器、伺服电机、谐波减速器等均实现自主研发突破。在控制精度与响应速度上,凭借领先的控制系统,具备快速的响应频率与精确的控制能力,将控制器与机械臂集成为一体确保在执行任务过程中的准确性与高效性。
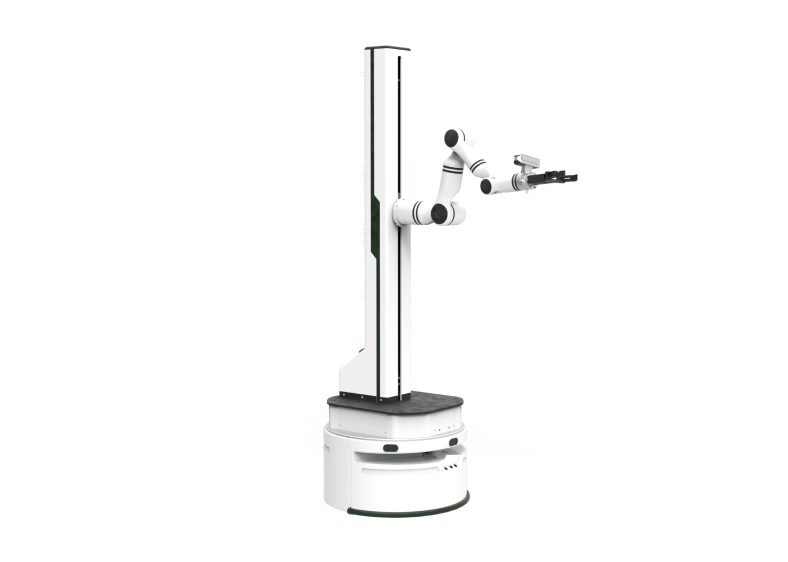
智境云创创新运用具身机器人,从运动学到控制算法等多个维度进行数据采集,这些高精度、高灵活性的机械臂能够在复杂环境中捕捉到丰富的三维场景信息、物体的物理属性及与环境的交互细节,为构建高度逼真的仿真环境提供了至关重要的数据基础。将这些数据集应用于仿真环境训练,将极大提升机器人的性能与智能化水平,推动具身智能技术的跨越式发展。
智境云创强大的Behavision空间智能MaaS平台,通过采用业界领先的高精度光场扫描技术与超大规模的专业动捕棚,采集海量且多元化的动态通用数据。自主研发独特的方案结合机械臂与高精度传感器,如RGB-D相机等,使得在复杂多变的环境中也能实现精准的数据采集,尤其是高精度3D数据的获取。通过精心编写的控制脚本与先进算法,机械臂的自动化运动控制与数据采集过程得以高效实现,显著提升了数据采集的精度与效率。
结合虚拟仿真平台技术,将模仿学习的数据在仿真环境进行海量泛化训练,可以更好的提高泛化能力和适应性。智境云创始终坚守高标准的数据采集流程与质量控制机制,确保数据的全面性、精确性、高清度及实用性,目前已积累了超过百万组3D数据与35万组多模态数据。
此次睿尔曼公司与智境云创的战略合作,双方将携手探索具身智能时代更多未知潜能,加速实现让机器人走进千行百业、千家万户。

微信公众号

抖音号

视频号
©2021 睿尔曼智能科技(北京)有限公司 版权所有 | 技术支持:外贸网站建设


































 上一个
上一个

