 2024-12-20
2024-12-20近日,睿尔曼与穹彻智能正式签订生态合作伙伴战略协议。双方将就重点行业进行联合解决方案设计,充分发挥各自技术优势和市场资源,共同推动具身智能在重点行业的落地应用,真正实现让机器人走入千行百业、千家万户。
1、做好具身智能机器人的坚实”基座“
在AI技术的推动下,机器人执行精细任务的能力正逐步重塑公众的认知。机器人正经历着从单一功能向多功能、从固定场景向多场景的转变,朝着更智能、更泛化的方向发展。而AI与机器人的结合,使得机器人能适用多场景的任务执行,有效拓展在复杂任务执行上的能力边界。
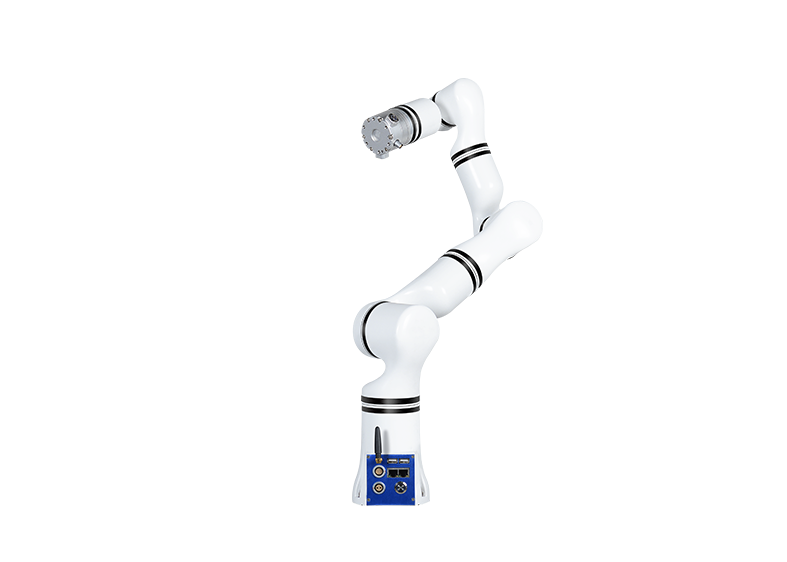
睿尔曼的目标是要做好具身智能机器人的坚实“基座”,其中,睿尔曼超轻量仿人机械臂在设计上参照了人体胳膊的长短、粗细、灵活度及负载能力,从外观到性能实现与人、与工作、与生活环境的友好共融,力求 “人能干,它能干”,“超轻量仿人” 优势尽显。随着具身智能的硬件和软件逐渐成熟,会陆续看到机器人在日常生活场景中的各种应用。正如穹彻智能“地面清理”演示,便是一个生动的实践。
2、强强联合,拓展机器人应用能力边界
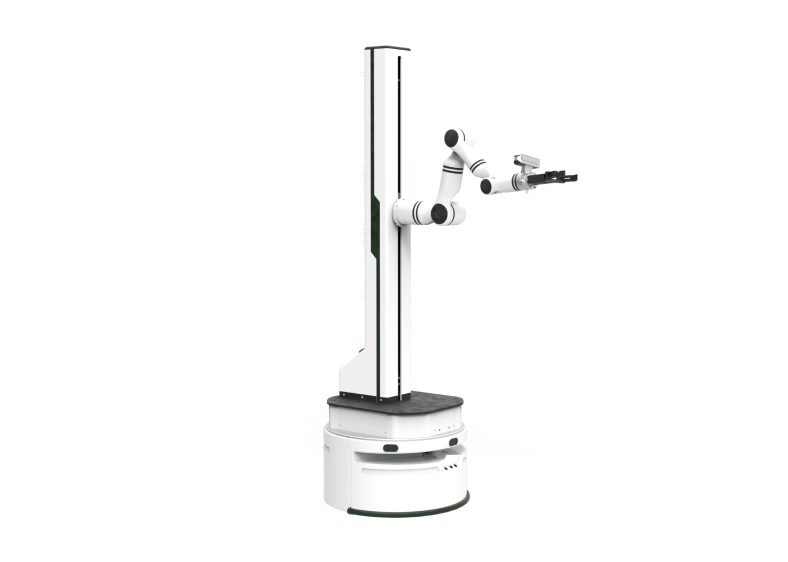
在2024年7月的世界人工智能大会上,穹彻智能展示了其具身大脑的强大性能,真机现场完成了多项任务的演示。其中,搭载睿尔曼超轻量仿人机械臂的穹彻智能“地面清理”演示,充分展现了穹彻具身大脑如何赋能单臂移动机器人平台实现指令推理分解、任务规划、物体分类、环境感知、自主导航和通用抓放,从而自主闭环地完成地面清理任务,体现了穹彻具身大脑高场景适应性、操作物体多样性的通用智能特点和优势。
其技术特征包括:
支持文字和语音双模式输入指令,并对指令进行语义分析和推理分解;
结合视觉和实体世界知识,可对地面上所有物体进行扫描和识别,并自主决策拾取对象、规划行进路线;
根据形成的短期记忆(物体位置和姿态、实时环境状态等)自主导航,自动避障;
运用通用物体抓取技能AnyGrasp,识别拾取对象的最佳抓取姿态,检测速度快、决策时间短;
基于实体世界知识,根据物体属性将其放入对应位置。
基于睿尔曼的高性能本体设计和穹彻具身大脑,双方将打造更智能、更灵活的应用场景解决方案,共同拓展机器人应用能力边界。
同时,睿尔曼也期待与更多的行业生态伙伴链接,深入理解和挖掘不同行业具体业务场景的痛点和需求,加速推动具身智能机器人走入千行百业、千家万户,为终端客户带来更大的产品价值。

微信公众号

抖音号

视频号
©2021 睿尔曼智能科技(北京)有限公司 版权所有 | 技术支持:外贸网站建设


































 上一个
上一个

