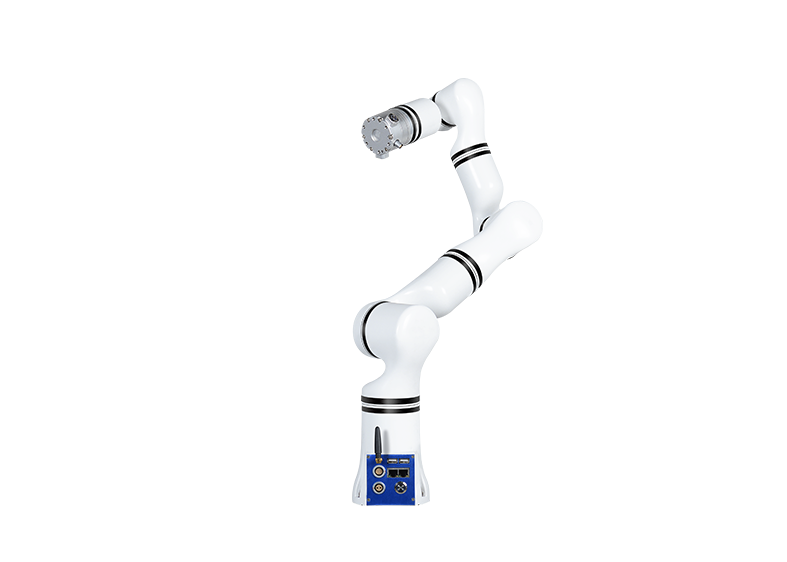
RM65-B
RM65-6F
RM75-B
RM75-6F
ECO62-B
ECO65-B
ECO65-6F
ECO63-B
ECO63-6F
RML63-B
RML63-6F
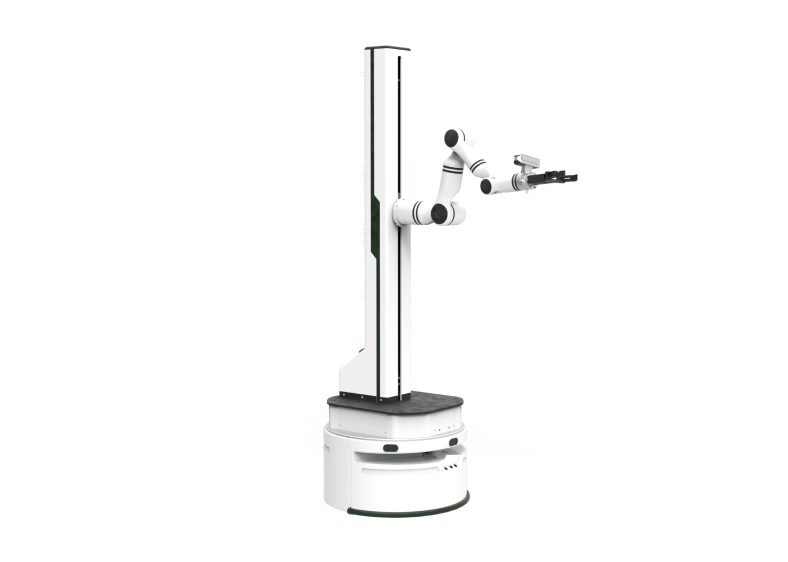
复合升降机器人
AI理疗机器人
具身双臂升降平台
具身智能双臂开发平台
RMG24
D435C
DaBai DCW
RM-MVQ
水滴-Water2
Hermes定制版
Tracer
AG-105-145
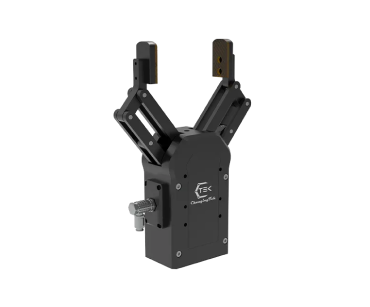
RM-SFG
FAE2MR86M
EVS08
ERG32-150
RG52-050
RGI-100-30
RM56S2B-2R/L
RM-A001-L/R
EG2-SF16
AG-160-95
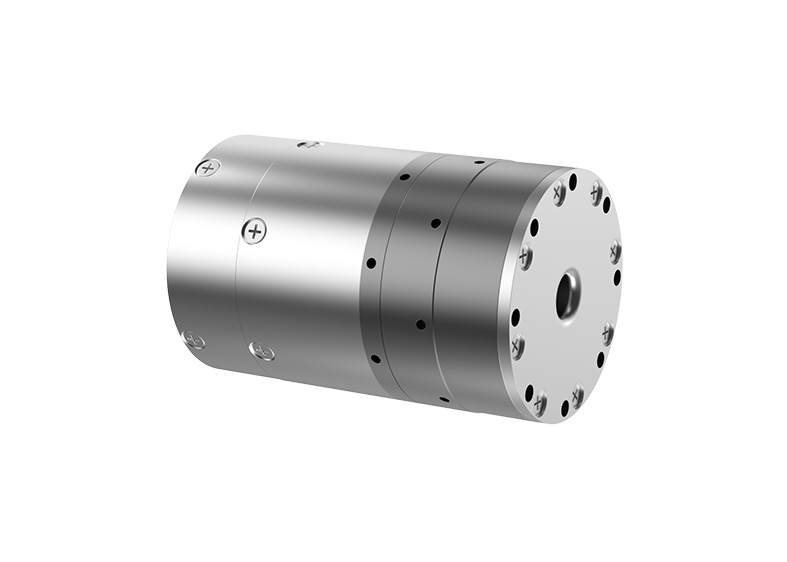
WHJ03
WHJ10
WHJ30
WHJ60
WHJ10-力矩版
WHJ30-力矩版
WHJ60-力矩版





































 上一个
上一个

